 Home - Products - Download - Mission - Free Tools - Index - Contact - News |
Magnetic Gripper: | ||||
|
This magnetic gripper is from a series of simple tools for collaborative robots that have been made available under an Open Source Hardware license.
The tools are designed by 4TECH Robotics ApS and based on 3D-printed parts. This and other tools for robots are published as a free design. More free tools from 4TECH Robotics ApS |
 |
|||
Scope: | ||||

|
This simple magnetic gripper is based on a small solenoid that is powered from the robot arm. This is an example of how 3D-printed parts can be used build a small and simple tool for collaborative robots. |
 |
||
Video: | ||||
|
|
||||
Parts for the tool: | ||||
|
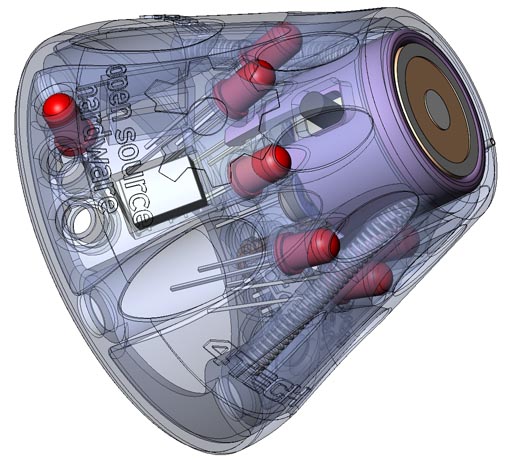
The gripper consists of a few parts. A 3D-printed housing and detector ring. A 24V solenoid with a typical holding force of 53N. The solenoid is switched on and off via a relay and controlled by the digital output from the robot arm. A spring loaded ring around the solenoid housing is designed to detect if the gripper is holding on to a part. This ring activates two micros witches inside the housing. One for switching between the red and green LED indicators and one for setting a signal on the digital input on the robot controller. You will need a solonoide from RS-Components RS-Components: 785-8512. |
 |
|||
CAD-files: | ||||

|
Download CAD-files for the magnetic gripper This housing is designed for the Kelvin Tool Changer tool plate. It can be mounted directly on a robot arm but then you must add an opening for the signal cable in the housing. |
 |
||
Web Shop: | ||||
| You can buy the 3D-printed parts for the Vacuum Gripper from 4TECH Robotics webshop at Shapeways You will need "Magnetic Gripper". The ring is placed inside the housing. This is only the 3D-printed plastic parts for the tool. You have to supply the other parts and to assemble the tool your self. Feel free to contact for more information on the free tools. |
 Shapeways |
|||
| Last update: 9/11 2020 | Cookie Free | Follow us on LinkedIN | © 2020 Copyright by 4TECH Robotics ApS. All Rights Reserved |