 Home - Products - Download - Mission - Free Tools - Index - Contact - News |
Products: | ||||
| Kelvin Tool Changer and Adapter Plate by 4TECH Robotics ApS If you have any questions or need more information, please contact us: kelvin@toolchanger.eu |
||||
Kelvin Tool Changer: | ||||
  |
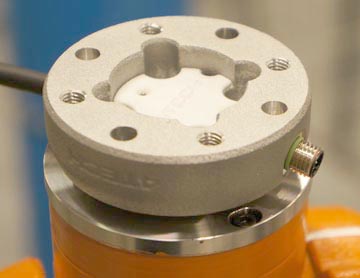
Designed for collaborative use: The Kelvin Tool Changer is designed to be used where the operator work very close together with the robots. No sharp edges or parts that may harm an operator. Automatic and programmed tool changes: With this tool changer, the robot can be programmed to automatically switch between different tools. Production of customized products can be automated and executed in small batches without losing time changing the production setup. Different jobs at the same time: When a robot can perform multiple tasks with different tools, it is easy to take advantage of a robot in a small production setup. This can reduce the risk for small SMEs when investing in the first robot. Automatic and manual: Tool changes can be performed either automatically by the robot or manually by the operator. Kelvin Tool Changer connects power, signals and two pneumatic lines as standard. |
  |
||
4TECH Adapter Flange: | ||||
  |
UR tools on all robots: Robots come with different sizes of tool flanges. Kelvin Tool Changer and most of the new tools for small robots are designed with a flange that fits Universal Robots. To make it easy to use the tool changer on all robots, we offer a series of smart adapter flanges. These adapter flanges also make it easy to use all the smart tools designed for UR robots on robots with a different tool flange size. Built-in electrical connector: These smart adapter plates have a build in connector for electric power and signals. By using a socket, identical to UR robots, these adapter plates will not only solve the flange size problem but also offer a smart solution to the wiring. |
  |
||
Free Tools: | ||||
 |
Free tools for collaborative robots: Companies can benefit from cobots with a tool changer to automate small volume - high mix production. To help this development, we now publish information on how to 3D-print simple low-cost tools for collaborative robots. |

| ||
| Last update: 9/11 2020 | Cookie Free | Follow us on LinkedIN | © 2020 Copyright by 4TECH Robotics ApS. All Rights Reserved |